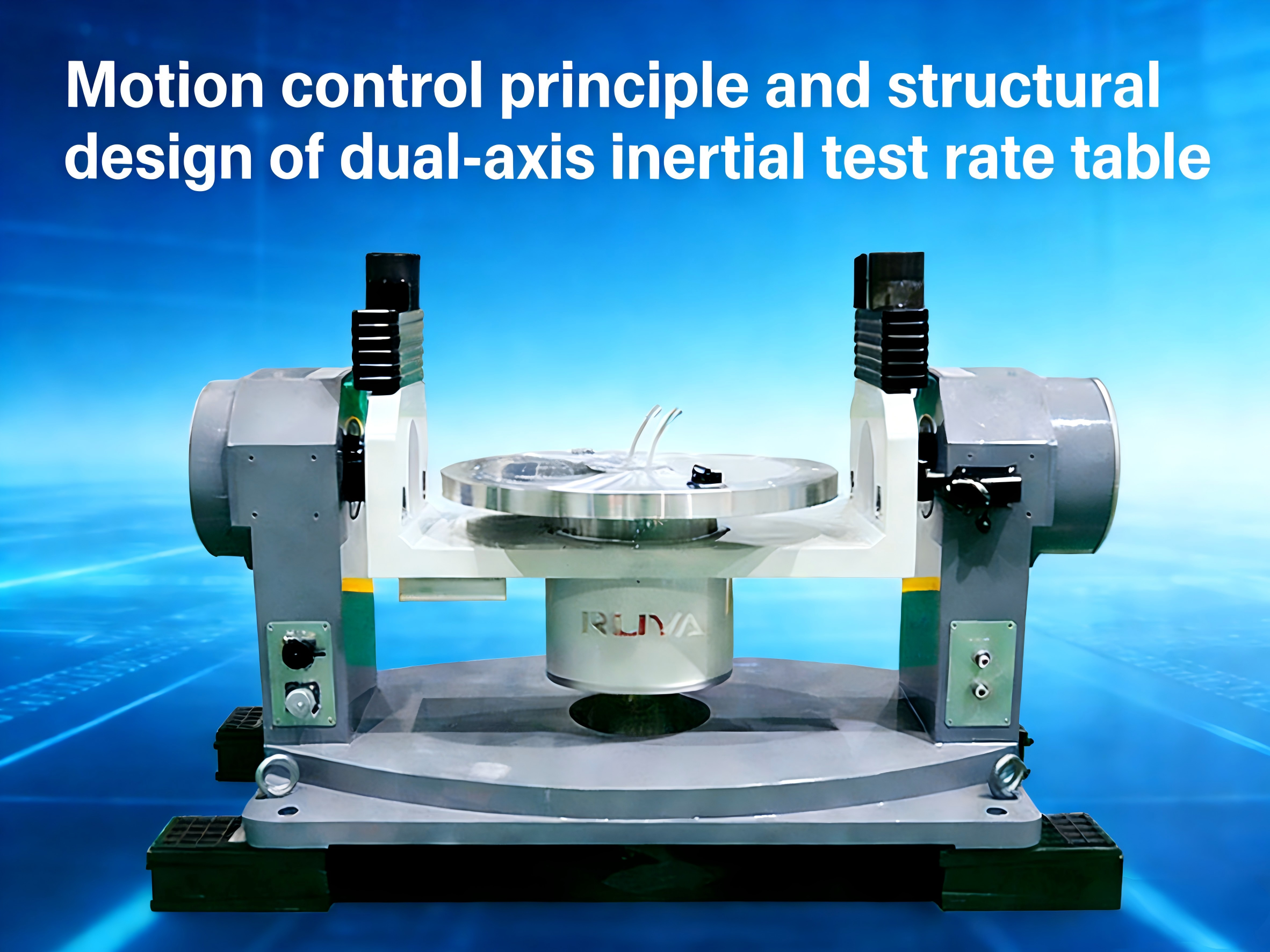
Als de kerncomponent van een traagheidselementnavigatiesysteembepaalt de meetnauwkeurigheid van de IMU rechtstreeks de algehele prestaties van het navigatiesysteem. Tweedimensionale kalibratie van de IMU omvat voornamelijk het kalibreren van de foutparameters van de versnellingsmeters en gyroscopen in het horizontale vlak (meestal een combinatie van pitch-roll of azimut-pitch). Asnelheid met twee assentafel, met zijn uiterst nauwkeurige hoekpositionering en standcontrolemogelijkheden, is de kernuitrusting voor het bereiken van deze kalibratie. Dit artikel, gebaseerd op industriestandaarden en technische praktijken, beschrijft het hele proces van tweedimensionale IMU-kalibratie met behulp van een twee-astarieftabel, die vier hoofdfasen beslaat: voorbereiding vóór de kalibratie, kernkalibratieprocedures, gegevensverwerking en -verificatie, en laatste stappen, die de standaardisatie garanderenEnherhaalbaarheidvan het kalibratieprocesen betrouwbaarheid van dekalibratieresultaten.
I. Voorbereidingen vóór kalibratie
Voorbereiding vóór de kalibratie is van fundamenteel belang om de nauwkeurigheid van de kalibratie te garanderen. Het moet in vier aspecten worden uitgevoerd: selectie en inspectie van apparatuur, controle van de omgevingsconditie, IMU-installatie en debuggen, en installatie van het softwaresysteem, om ervoor te zorgen dat elke stap aan de kalibratievereisten voldoet.
(Ⅰ) Apparatuurselectie en inspectie
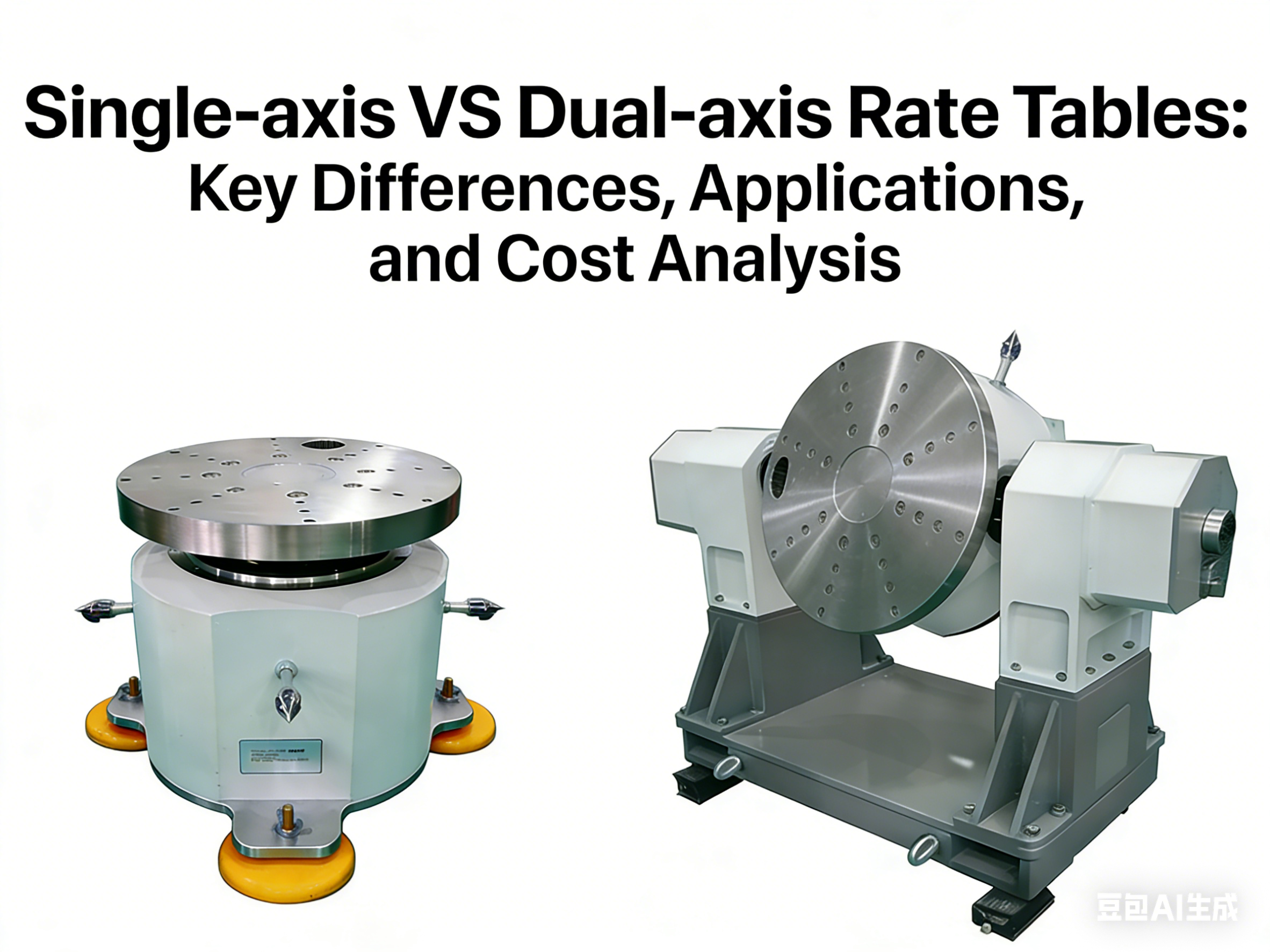
1.Dubbele astarieftafel selectie: Selecteer een dubbele as op basis van het nauwkeurigheidsniveau en de kalibratievereisten van de IMUtarieftafel die voldoet aan de vereisten voor hoekpositienauwkeurigheid, hoeksnelheidsstabiliteit en asloodrechtheid. Voor IMU's met middelhoge tot hoge nauwkeurigheid (zoals IMU's van navigatiekwaliteit) kan detariefde hoekpositienauwkeurigheid van de tafel moet beter zijn dan 10″, en de loodrechtheid van de as beter dan 5″; voor IMU's van consumentenkwaliteit, detariefde tafelnauwkeurigheid kan op passende wijze worden verminderd (hoekpositienauwkeurigheid ≤ 30″). Tegelijkertijd is detariefDe tafel moet statische positionering en dynamische snelheidsuitvoermodi ondersteunen, en voldoen aan de kalibratievereisten voor nulafwijking en schaalfactor van de accelerometer, evenals nulafwijking en schaalfactor van de gyroscoop.
2.Controles van hulpapparatuur: Bereid een uiterst nauwkeurige voeding voor (stabiliteit van de uitgangsspanning ≤0,1%) om de IMU van stroom te voorzien, waarbij u ervoor zorgt dat spanningsschommelingen geen meetfouten veroorzaken; gebruik een data-acquisitiekaart (bemonsteringsfrequentie ≥100 Hz, resolutie ≥16-bit) om de versnellings- en hoeksnelheidssignalen te verkrijgen die door de IMU worden afgegeven, evenals de hoekpositie/hoeksnelheid-feedbacksignalen van detarieftafel; controleer het servobesturingssysteem met detarieftafel om een soepele asrotatie te garanderen zonder stapverlies of jitter. Bovendien zijn hulpmiddelen zoals anivelleringsinstrumenten momentsleutel zijn vereist voor het waterpas stellen en bevestigen van de IMU na installatie.
3.Kalibratie en verificatie van apparatuur: Voorlopige kalibratie van de dubbele astarieftafel wordt uitgevoerd om de hoekpositie ervan te verifiëren,hoeksnelheidnauwkeurigheid en loodrechtheid van de as,onder andere technische specificaties. De werkelijke waarden en opgedragen waarden voor elke as van detarieftafel op verschillende hoekposities worden gemeten om ervoor te zorgen dat de afwijkingen binnen aanvaardbare grenzen blijven. DetariefHet horizontale referentievlak van de tafel wordt gecontroleerd om er zeker van te zijn dat de vlakheid beter is dan5″. Tegelijkertijd wordt de IMU ingeschakeld en voorverwarmd, wordt de initiële uitgangsstatus geregistreerd en worden initiële apparatuurstoringen geëlimineerd.
(Ⅱ) Controle van de omgevingsconditie
1.Temperatuurregeling: De foutparameters van de IMU worden aanzienlijk beïnvloed door de temperatuur. De temperatuur van de kalibratieomgeving moet worden geregeld op (20 ± 2) ℃ en de temperatuurveranderingssnelheid moet ≤0,5 ℃/h zijn. Dit kan worden bereikt via een laboratorium met constante temperatuur of een temperatuurcontrolesysteem om de temperatuurstabiliteit tijdens de kalibratie te garanderen en de impact van temperatuurdrift op de kalibratieresultaten te verminderen.
2.Trillings- en interferentiecontrole: De kalibratieomgeving moet ver verwijderd zijn van trillingsbronnen (zoals werktuigmachines, ventilatoren).,zware voertuigen, enz.), en trillingsisolatiemaatregelen moeten op de grond worden genomen (zoalshet aanleggen van een trillingsisolerende fundering ofhet installeren van trillingsisolatiepads) om ervoor te zorgen dat de versnelling van de omgevingstrillingen ≤0,01 g bedraagt. Vermijd tegelijkertijd sterke elektromagnetische interferentie en aard detarieftafel, IMU en data-acquisitieapparatuur (aardingsweerstand ≤4Ω) om elektromagnetische ruisinterferentie op het IMU-uitgangssignaal te verminderen.
3.Luchtdruk- en vochtigheidsregeling: Voor IMU's die afhankelijk zijn van luchtdruk voor kalibratie (zoals sommige gecombineerde IMU's met barometers), moet de omgevingsluchtdruk worden gestabiliseerd op standaard atmosferische druk (101,325 kPa ± 1 kPa) en moet de relatieve vochtigheid worden gecontroleerd op 40% ~ 60% om te voorkomen dat veranderingen in de vochtigheid ervoor zorgen dat de interne circuits van de IMU vochtig worden of de isolatieprestaties verslechteren.
(Ⅲ) IMU-installatie en foutopsporing
1.Mechanische installatie: Beveilig de IMU aan dewerktafel van de tweeassige tarieventabel met behulp van een speciale klem, waarbij ervoor wordt gezorgd dat de detectie-as van de IMU is uitgelijnd met de ratcoördinaatassen van de tabel. Normaal gesproken moet de X-as van de IMU evenwijdig zijn aan de rotatieas van de ratbinnenste (of buitenste) as van de tafel, en de Z-as moet loodrecht op de r staanathet werktafelvlak van de tafel (dwz langs de richting van de zwaartekracht). Gebruik een momentsleutel om de klem vast te zetten met het gespecificeerde aanhaalmoment, waarbij u overmatige losheid vermijdt die zou kunnen leiden tot verplaatsing van de IMU tijdens de kalibratie, of overmatige strakheid die structurele vervorming van de IMU zou kunnen veroorzaken.
2.Kalibratie van asuitlijning: De nauwkeurigheid van de uitlijning tussen de IMU en detarieftafel wordt gekalibreerd met behulp van een waterpas- en laserpositioneringsinstrument. Pas eerst detarieftafel naar een horizontale positie, waarbij ervoor wordt gezorgd dat de Z-as van de IMU parallel loopt aan de richting van de zwaartekracht. Vervolgens kunt u door het draaien van detariefControleer in de tabel de parallelliteit tussen de detectie-as van de IMU en detariefrotatie-as van de tafel. De parallelliteitsfout moet ≤5″ zijn. Als de uitlijningsnauwkeurigheid niet aan de eisen voldoet, past u de positie van het armatuur aan en herhaalt u de kalibratie totdat deze aan de norm voldoet.
3.Elektrische aansluiting en foutopsporing: Sluit de IMU aan op de voeding en de data-acquisitiekaart, zorg voor veilige bedrading en goed contact om signaalverlies of vervorming veroorzaakt door losse verbindingen te voorkomen. Schakel de IMU in en verwarm deze voor; de voorverwarmingstijd is afhankelijk van het IMU-type (IMU's van navigatiekwaliteit hebben doorgaans 30-60 minuten nodig, IMU's van consumentenkwaliteit hebben 10-20 minuten nodig) om de interne temperatuur van de IMU te laten stabiliseren. Controleer tijdens het voorverwarmen de stabiliteit van het uitgangssignaal van de IMU. Als signaalfluctuaties, overmatige ruis of andere afwijkingen optreden, dient u problemen met de bedrading of apparatuur op te lossen.
(Ⅳ) Softwaresysteemconfiguratie
1.Configuratie van de besturingssoftware: Installeer de dubbele astarieftafelbesturingssoftware en configureer de ratasparameters van de tafel (zoals asdiameter, overbrengingsverhouding), besturingsmodus (statisch/dynamisch), hoekpositie/hoeksnelheidinstellingen, etc. Stel tegelijkertijd de triggervoorwaarden voor de data-acquisitie in om ervoor te zorgen dat de data-acquisitie pas begint na de ratDe houding van de tafel is gestabiliseerd, waardoor signaalinterferentie tijdens het overgangsproces wordt vermeden.
2.Debuggen van software voor gegevensverzameling: Debug de data-acquisitiesoftware, stel parameters in zoals de bemonsteringsfrequentie, de bemonsteringsduur en het gegevensopslagformaat (bijv. CSV, MAT-bestand). Breng een synchroon acquisitiemechanisme tot stand voor het IMU-uitgangssignaal en detarieftabelfeedbacksignaal, waarbij ervoor wordt gezorgd dat hun tijdstempels zijn uitgelijnd met een fout ≤1ms. Controleer de integriteit en nauwkeurigheid van de gegevensverzameling door middel van gesimuleerde acquisitietests en los problemen op zoals gegevensverlies en vertragingen.
3.Implementatie van kalibratie-algoritmen: Op basis van kalibratievereisten (zoals kalibratie van versnellingsmeter/schaalfactorkalibratie, gyroscoopafwijking/kalibratiefactorkalibratie), implementeert u het overeenkomstige kalibratiealgoritme (zoals kleinste kwadratenmethode, Kalman-filtermethode). Initialiseer de algoritmeparameters, zoals het aantal iteraties en de convergentiedrempel, om ervoor te zorgen dat het algoritme de foutparameters van de IMU nauwkeurig kan oplossen.
II. Kernkalibratieproces
Het kernkalibratieproces draait om de twee kerncomponenten van de IMU: de versnellingsmeter en de gyroscoop. Gebaseerd op de statische positionering en dynamische snelheidsregeling van de dubbele astarieftabel worden de foutparameters in de twee dimensies stap voor stap gekalibreerd. Dit proces neemt de tweedimensionale "pitch-roll"-kalibratie als voorbeeld en omvat drie belangrijke stappen: statische kalibratie van de versnellingsmeter, statische nul-bias-kalibratie van de gyroscoop en kalibratie van de dynamische snelheid van de gyroscoop.
(Ⅰ) Statische kalibratie van versnellingsmeter
Het doel van de statische kalibratie van een versnellingsmeter is het oplossen van de nulafwijking en schaalfactor. Het gebruikt de projectie van de zwaartekrachtversnelling onder verschillende houdingen als referentie-invoer, stelt een foutenmodel op en lost de parameters op door het door de IMU afgegeven versnellingssignaal te meten.
1.Houdingplanning voor kalibratie: Gebaseerd op de tweedimensionale richtingen van stampen en rollen, zijn zes typische statische houdingen gepland (waardoor wordt gegarandeerd dat de zwaartekrachtversnelling de X-, Y- en Z-gevoelige assen van de versnellingsmeter volledig kan bestrijken). De specifieke houdingen zijn als volgt: ① Pitch 0°, Roll 0° (Z-as positief in de richting van de zwaartekracht); ② Pitch 0°, rol 180° (Z-as negatief in de richting van de zwaartekracht); ③ Pitch 90°, Roll 0° (X-as positief in de richting van de zwaartekracht); ④ Pitch 90°, rol 180° (X-as negatief in de richting van de zwaartekracht); ⑤ Pitch 0°, Roll 90° (Y-as positief in de richting van de zwaartekracht); ⑥ Helling 0°, rol 270° (Y-as negatief in de richting van de zwaartekracht).
2.Houdingaanpassing en stabilisatie: Hoekpositiecommando's voor elke stand worden opeenvolgend verzonden via de dubbele astariefsoftware voor tafelbesturing. Na detarieftafel drijft de IMU aan om naar de doelhouding te roteren, deze blijft statisch stabiel. De stabilisatietijd voor elke stand is ≥30s, waardoor de stabiliteit van het door de IMU afgegeven versnellingssignaal wordt gewaarborgd (signaalfluctuatieamplitude ≤0,001g). Tijdens de stabilisatie wordt het hoekpositie-feedbacksignaal van detarieftafel wordt in realtime bewaakt. Als de standafwijking het toegestane bereik (≤5″) overschrijdt, wordt detarieftabel voert automatisch compensatieaanpassingen uit.
3.Gegevensverzameling en -registratie: Nadat elke stand is gestabiliseerd, wordt de data-acquisitiesoftware geactiveerd om de door de IMU afgegeven versnellingssignalen op de X-, Y- en Z-as te verwerven. De bemonsteringsduur is ≥10s en de bemonsteringsfrequentie is ≥100Hz. Tegelijkertijd wordt de werkelijke hoekpositie van detarieftabel (hellingshoek θ, rolhoek φ) wordt geregistreerd om de projectiewaarden van de zwaartekrachtversnelling op elke gevoelige as te berekenen (referentie-invoer). De verkregen gegevens worden per houding opgeslagen, duidelijk gelabeld met houdingsinformatie en tijdstempels.
4.Foutmodel opzetten en parameteroplossing: Het foutenmodel van de versnellingsmeter wordt opgesteld, waarbij kruiskoppelingsfouten worden genegeerd (die kunnen worden vereenvoudigd bij tweedimensionale kalibratie). Het foutenmodel is als volgt:
a = K(a + b) (i=X,Y,Z)
Waar a de versnelling is van de i-de as die wordt afgegeven door de IMU, is K de schaalfactor van de i-de as, a is de referentieversnelling van de i-de as (projectie van de zwaartekrachtversnelling), en b is de nulafwijking van de i-de as. Gebaseerd op de referentieversnelling a (berekend uit θ en φ, zoals de referentieversnelling op de Z-as a=g·cosθ·cosφ, de referentieversnelling op de X-as a=g·sinθ, de referentieversnelling op de Y-as a=g·sinφ·cosθ, waarbij g de zwaartekrachtversnelling is, genomen als 9,80665 m/s²) en de overeenkomstige a, K en b worden opgelost met behulp van de kleinste kwadratenmethode.
(Ⅱ)Gyroscoop statische nul-bias-kalibratie
De statische nulvoorspanning van een gyroscoop verwijst naar de uitgangsafwijking van de gyroscoop wanneer er geen hoeksnelheidsinvoer is. Dit probleem moet worden opgelost door langdurige data-acquisitie terwijl de IMU stilstaat.
(Ⅲ)Gyroscoop dynamische snelheidskalibratie
Het doel van de dynamische snelheidskalibratie van de gyroscoop is het oplossen van de schaalfactor. Gebruikmakend van de bekende hoeksnelheidsuitvoer door de dubbele astarieftabel als referentie-ingang, wordt een foutenmodel opgesteld en wordt de schaalfactor opgelost door het uitgangssignaal van de gyroscoop te meten.
1.Selectie van kalibratiestand: Selecteer een horizontale houding met 0° pitch en 0° roll. Bij deze stand heeft de IMU geen input voor de hoeksnelheid, en bevat de output van de gyroscoop alleen nul bias en ruis. Detariefin deze houding hoeft de tafel niet te draaien; houd het podium eenvoudig horizontaal en stabiel.
2.Gegevensverzameling op lange termijn: Start de data-acquisitiesoftware en verkrijg de uitgangssignalen van de X-, Y- en Z-assen van de gyroscoop. De bemonsteringstijd moet ≥60 minuten zijn en de bemonsteringssnelheid ≥100 Hz. Houd tijdens het acquisitieproces voortdurend de omgevingstemperatuur in de gatentarieftafelhouding om temperatuurstabiliteit (fluctuatie ≤0,2℃) en geen standafwijking (afwijking ≤5″) te garanderen om te voorkomen dat er extra fouten door externe factoren worden geïntroduceerd.
3.Zero bias-berekening: De verkregen gyroscoopuitvoergegevens worden voorbewerkt om uitschieters te verwijderen (met behulp van het 3σ-criterium), en vervolgens wordt de gemiddelde waarde van het uitvoersignaal van elke as berekend. Deze gemiddelde waarde is de statische nulvoorspanning b van de gyroscoop (i=X,Y,Z). Tegelijkertijd wordt de standaardafwijking van de gegevens berekend om het geluidsniveau van de gyroscoop te beoordelen. Als de standaardafwijking te groot is (overschrijdt de technische specificaties van de IMU), moet een defect aan de apparatuur of omgevingsinvloeden worden onderzocht.
4.Tariefpuntplanning: Plan op basis van het bereik van de IMU en het daadwerkelijke toepassingsscenario dynamische tariefpunten in zowel de spoed- als de roldimensies. Selecteer 5-7 snelheidspunten voor elke dimensie, die voorwaartse en achterwaartse snelheden omvatten (bijv. -100°/s, -50°/s, 0°/s, 50°/s, 100°/s), waarbij het 0°/s snelheidspunt wordt gebruikt om de consistentie van de statische nulafwijking te verifiëren. De selectie van tariefpunten moet ervoor zorgen dat deze het bereik van de IMU niet overschrijden en dat detarieftabel kan de snelheid stabiel weergeven (snelheidsstabiliteit ≤ 0,1°/s).
5.Beoordeel output en stabilisatie: Commando's voor elk snelheidspunt worden opeenvolgend verzonden in de pitch- en roll-afmetingen via dubbele assentariefsoftware voor tafelbesturing. Na detariefDe tabel drijft de IMU aan om naar de doelsnelheid te roteren, maar handhaaft de dynamische stabiliteit met een stabilisatietijd ≥20s. Tijdens de stabilisatie wordt het hoeksnelheidsfeedbacksignaal van detarieftafel wordt in realtime bewaakt. Als de snelheidsafwijking het toegestane bereik (≤0,5°/s) overschrijdt, wordt detarieftabel voert automatisch een tariefcompensatie uit.
6.Gegevensverzameling en -registratie: Nadat elk snelheidspunt is gestabiliseerd, start u de data-acquisitiesoftware om het uitgangssignaal van de overeenkomstige gevoelige as van de gyroscoop te verkrijgen (verkrijg bijvoorbeeld de gyroscoopuitvoer van de X-as bij rotatie in de pitch-dimensie, en verkrijg de gyroscoopuitvoer van de Y-as bij rotatie in de roldimensie). De bemonsteringstijd is ≥10s en de bemonsteringssnelheid is ≥100Hz. Noteer tegelijkertijd de werkelijke hoeksnelheid van detarieftabel (referentie-invoer ω), en sla de gegevens op volgens het snelheidspunt en de dimensie.
7.Opzetten van foutmodellen en oplossen van parameters: Er is een snelheidsfoutmodel voor de gyroscoop opgesteld, waarbij kruiskoppelingsfouten worden genegeerd. Het model is als volgt:
ω = K(ω + b) (i=X,Y)
Waar ω de uitgangshoeksnelheid is van de i-de as van de gyroscoop, is K de schaalfactor van de i-de as, ω is de referentiehoeksnelheid van de i-de as (de werkelijke uitgangssnelheid van de i-de as).tarieftabel), en b is de statische nulafwijking van de i-de as (reeds opgelost in de statische kalibratie). Vervang ω en de overeenkomstige ω op elk snelheidspunt in het model en los K op met behulp van de kleinste kwadratenmethode.
Ⅲ.Gegevensverwerking en validatie
Gegevensverwerking en -verificatie zijn belangrijke stappen om de betrouwbaarheid van kalibratieresultaten te garanderen. De verzamelde ruwe gegevens moeten worden voorbewerkt en na het oplossen van foutparameters moeten restanalyses, herhaalbaarheidsverificatie en nauwkeurigheidsverificatie worden uitgevoerd. Als de verificatie mislukt, moet het proces worden teruggestuurd naar de kernkalibratieprocedure voor herkalibratie.
1.Uitschieter verwijderen: Het 3σ-criterium of Grubbs-criterium wordt gebruikt om uitschieters uit de originele gegevens (versnelling, hoeksnelheidssignalen) te detecteren en te verwijderen. Voor het 3σ-criterium worden het gemiddelde μ en de standaardafwijking σ van de gegevens berekend. Gegevens die het bereik [μ-3σ, μ+3σ] overschrijden, worden geïdentificeerd als uitbijters en vervangen door interpolatie van aangrenzende gegevens of direct verwijderd.
2.Filteren: De voorbewerkte onbewerkte gegevens worden laagdoorlaatgefilterd om hoogfrequente ruis te verwijderen. Er wordt een Butterworth laagdoorlaatfilter geselecteerd en de afsnijfrequentie wordt bepaald op basis van de IMU-bandbreedte (meestal 1/5 tot 1/3 van de IMU-bandbreedte) om overfiltering en signaalvervorming te voorkomen. De gefilterde gegevens worden gebruikt voor de daaropvolgende berekening van de foutparameters.
3.Uitlijning van gegevenssynchronisatie: Om de discrepantie in de tijdstempel tussen het IMU-uitgangssignaal en detarieftabelfeedbacksignaal, wordt lineaire interpolatie gebruikt voor synchronisatie-uitlijning. Dit zorgt ervoor dat elke set IMU-uitvoergegevens overeenkomt met een nauwkeurigheidtarieftabelhouding of snelheidsstatus, met een synchronisatiefout ≤1ms.
4.ParameterSoplossingOoptimalisatie:Vervang de voorbewerkte gegevens door de foutmodellen van de versnellingsmeter en gyroscoop, en gebruik de kleinste kwadratenmethode om foutparameters zoals nulafwijking en schaalfactor op te lossen. Voor complexe scenario's kan de Kalman-filtermethode worden gebruikt om de resultaten van de parameteroplossingen te optimaliseren, waardoor de nauwkeurigheid en stabiliteit van de parameterschatting wordt verbeterd.
5.Residuele analyse: Bereken de residuen tussen de waargenomen waarden (IMU-uitvoer) en de modelvoorspellingen op elk gekalibreerd houdings-/snelheidspunt. De residuen weerspiegelen de pasnauwkeurigheid van het foutmodel. Als het gemiddelde van de residuen dicht bij 0 ligt en de standaarddeviatie klein is (restaire standaarddeviatie van de acceleratie ≤ 0,002g, resterende standaarddeviatie van de hoeksnelheid ≤ 0,1°/s), geeft dit aan dat het model goed past. Als de residuen te groot zijn of een duidelijke trend vertonen, moet het foutenmodel (bijvoorbeeld rekening houdend met kruiskoppelingsfouten) of de validiteit van de kalibratiegegevens opnieuw worden onderzocht.
6.Herhaalbaarheid verificatie: Voer onder dezelfde omgevingsomstandigheden en kalibratieprocedures drie volledige kalibratie-experimenten uit en bepaal de foutparameters voor elke kalibratie. Bereken de variatiecoëfficiënt (de verhouding tussen standaardafwijking en gemiddelde) van de drie parameters. Als de variatiecoëfficiënt ≤1% is, zijn de kalibratieresultaten goed herhaalbaar; als de variatiecoëfficiënt te groot is, moeten zaken als de stabiliteit van de apparatuur en omgevingsinterferentie worden onderzocht en moet herkalibratie worden uitgevoerd.
7.Nauwkeurigheidsverificatie: Selecteer stand-/snelheidspunten die niet betrokken zijn bij de kalibratie als verificatiepunten. Vervang de gekalibreerde foutparameters in het foutmodel om de IMU-uitvoer te compenseren, en bereken de fout tussen de gecompenseerde IMU-uitvoer en de referentie-invoer. Als de gecompenseerde fout voldoet aan de technische specificaties van de IMU (bijv. versnellingsmeetfout ≤ 0,01 g, hoeksnelheidsmeetfout ≤ 0,5°/s), is de kalibratienauwkeurigheid bevredigend. Als de fout niet aan de vereisten voldoet, moet het kalibratieproces opnieuw worden geoptimaliseerd (bijvoorbeeld meer stand-/snelheidspunten toevoegen voor kalibratie, het foutmodel aanpassen) en moet de kalibratie opnieuw worden uitgevoerd.
8.Verificatie van temperatuurstabiliteit (optioneel): Als de IMU over een breed temperatuurbereik moet werken, kunnen kalibratie-experimenten worden herhaald op verschillende temperatuurpunten (bijv. -10℃, 0℃, 20℃, 40℃, 60℃) om de variatie van foutparameters met de temperatuur te verifiëren. Er kan een temperatuurcompensatiemodel voor de foutparameters worden opgesteld om de meetnauwkeurigheid van de IMU onder verschillende temperatuuromstandigheden te verbeteren.
9.Opslag van gegevensclassificatie: Voorbewerkte onbewerkte gegevens, resultaten van foutparameteroplossingen, rapporten van restanalyses, verificatieresultaten, enz. worden gecategoriseerd en opgeslagen op basis van kalibratiedatum, IMU-nummer en kalibratieomgevingsomstandigheden. Gegevensopslagformaten gebruiken gangbare formaten (zoals CSV, MAT, PDF) om de leesbaarheid en traceerbaarheid van gegevens te garanderen.
10.Gegevensback-up: Voer meerdere back-ups uit van gearchiveerde gegevens (zoals lokale harde schijven en cloudopslag) om gegevensverlies te voorkomen. Back-upgegevens moeten duidelijk gelabelde bestandsnamen en verklarende documenten hebben, waarin het bijbehorende doel, proces en voorwaarden duidelijk worden gedefinieerd.
Ⅳ.Afwerking werkzaamheden
De laatste stappen omvatten voornamelijk het archiveren van kalibratiegegevens, het herstellen en onderhouden van apparatuur en het opstellen van een kalibratierapport om de traceerbaarheid van het kalibratieproces te garanderen en een basis te bieden voor het daaropvolgende gebruik en onderhoud van de IMU. Het kalibratierapport is een samenvatting van de kalibratiewerkzaamheden en moet het kalibratieproces en de resultaten volledig en nauwkeurig vastleggen, en omvat voornamelijk het volgende:
1.Uitschakeling en demontage van apparatuur: Schakel na de kalibratie de stroom naar de dubbele as uittarieftafel-, IMU- en data-acquisitieapparatuur. Koppel de IMU achtereenvolgens los van de armatuur en verwijder de IMU. Vermijd botsingen en trillingen tijdens de demontage om de gevoelige componenten van de IMU te beschermen.
2.ApparatuurCleunend enMonderhoud: Reinig de dubbele as rattafel, schachtsysteem en armaturen om stof en vuil te verwijderen; voer een visuele inspectie van de IMU uit om er zeker van te zijn dat deze onbeschadigd is en dat de bedradingspoorten schoon zijn. Registreer de gebruiksstatus en onderhoudsgegevens van de apparatuur als basis voor periodieke kalibratie van de apparatuur.
3.Herstel van apparatuurparameters: Herstel de parameters van de dubbele astarieftafel- en data-acquisitieapparatuur terug te zetten naar hun standaardstatus, sluit de besturingssoftware en acquisitiesoftware en zorg ervoor dat de apparatuur zich in een veilige standby-status bevindt.
4.Het kalibratierapportomvat het volgende:
(1)Informatie over kalibratieobject: IMU-model, serienummer, fabrikant en technische specificaties;
(2)Informatie over kalibratieapparatuur: dubbele as rattafelmodel en nauwkeurigheidsklasse, model voor data-acquisitieapparatuur en bemonsteringsparameters, en lijst met hulpapparatuur;
(3)Kalibreren van omgevingsomstandigheden: temperatuur, vochtigheid, luchtdruk, trillingen;
(4)Beschrijving van het kalibratieproces: kalibratiehouding/snelheidspuntplanning, data-acquisitieparameters, foutmodel en oplossingsalgoritme;
(5)Kalibratieresultaten: nulafwijking en schaalfactor van de versnellingsmeter, nulafwijking en schaalfactor van de gyroscoop, resultaten van resterende analyses, resultaten van herhaalbaarheidsverificatie en resultaten van nauwkeurigheidsverificatie;
(6)Conclusies en aanbevelingen: Of de kalibratieresultaten voldoen aan de normen, aanbevelingen voor IMU-gebruik (zoals temperatuurcompensatie, periodieke herkalibratiecyclus) en aanbevelingen voor apparatuuronderhoud.
Ⅴ.Voorzorgsmaatregelen
Samenvattend is de standaardprocedure voor tweedimensionale IMU-kalibratie met behulp van een rattabel moet strikt de logische volgorde volgen van "voorbereiding vóór kalibratie - kernkalibratie - gegevensverwerking en -verificatie - afwerkingwerk, "gericht op belangrijke aspecten zoals nauwkeurigheid van apparatuur, omgevingscontrole, asuitlijning en gegevenssynchronisatie. Via een gestandaardiseerde kalibratieprocedure en rigoureuze verificatiemethoden kunnen de foutparameters van de IMU nauwkeurig worden bepaald, waardoor de meetnauwkeurigheid aanzienlijk wordt verbeterd en de betrouwbare werking van het traagheidsnavigatiesysteem wordt gegarandeerd.
1.AlstariefTijdens de kalibratie treedt er een drift van de tafelstand of een abnormaal IMU-uitgangssignaal op. De kalibratie moet onmiddellijk worden gestopt, de fout moet worden onderzocht en de kalibratie moet opnieuw worden gestart om te voorkomen dat ongeldige kalibratiegegevens worden gegenereerd.
2.Devoorverwarmentijd van de IMU moet strikt voldoen aan de technische eisen. Onvoldoendevoorverwarmenzal leiden tot onstabiele foutparameters en de nauwkeurigheid van de kalibratie beïnvloeden.
3.De uitlijningsnauwkeurigheid van het assysteem van een rattabel heeft rechtstreeks invloed op de kalibratieresultaten. De ratDe tafel moet regelmatig worden gekalibreerd om ervoor te zorgen dat de nauwkeurigheid van het assysteem aan de eisen voldoet.
4.De temperatuur, trillingen, elektromagnetische interferentie en andere factoren van de kalibratieomgeving hebben een aanzienlijke invloed op de IMU-output. De omgevingsomstandigheden moeten strikt worden gecontroleerd en indien nodig moeten isolatie- en afschermingsmaatregelen worden genomen.
5.Het kalibratierapport moet door professionals worden beoordeeld om de nauwkeurigheid en standaardisatie van de rapportinhoud te garanderen, en het moet worden gearchiveerd en opgeslagen nadat de beoordeling is goedgekeurd.